结构组的同事主要工作内容是进行不同型号机器人本体结构设计,并完成6轴机器人的整机装配。笔者过去后,他们首先给我讲明了基本情况:
使用日本客户生产的减速机,机器人4轴在2000rpm,3000rpm运行会有异响且震动明显;
另一台同型号机器人使用其他厂家减速机,机器人4轴运行过程中不会出现异响及震动;
因为当前车间只有日本客户1台减速机,无法进行拆除更换,也就无法进行对比测试;
日本工程师认为不是减速机的问题,因为他之前未遇到过此种现象。

结构组的同事认为可以下结论了,既然使用其他厂家减速机的机器人不会出现异响和震动,那肯定就是日本厂家减速机的问题了,但是日本工程师很固执,坚决认为还可能存在其他原因。
笔者听完他们的描述也不能很快下结论,因为机器人运行中存在异响,抖动这种问题确实比较复杂,原因可能不唯一,也有可能是多种原因的叠加。
接下来就是给大家解释原因:首先来认识一下谐波减速机的结构,如下图所示。

由上图可知,谐波减速机有三个关键部件:波发生器,柔性轮和刚性轮,其中波发生器为椭圆形,在波发生器作用下柔性轮产生弹性形变并与刚性轮相互作用实现动力传递。
由于谐波减速机的运行特性是椭圆带动正圆运行,可以认为谐波减速机的输出是正弦波,则其输出会是一个跟速度相关的频率。假设电机转速为600r/min(电机带动波发生器旋转),则谐波减速机产生的谐振频率约为600÷60×2=20Hz,假如这时采集速度波形其震动频率也为20Hz,则其震动大概率是由减速机带来的,这种震动是调整伺服参数无法消除的。
PS:ω/60×2的含义:谐波减速机中波发生器椭圆每旋转一圈带动柔性轮产生2次形变,角速度ω单位先由r/min转换为r/s,然后×2即为谐波减速机的输出频率。
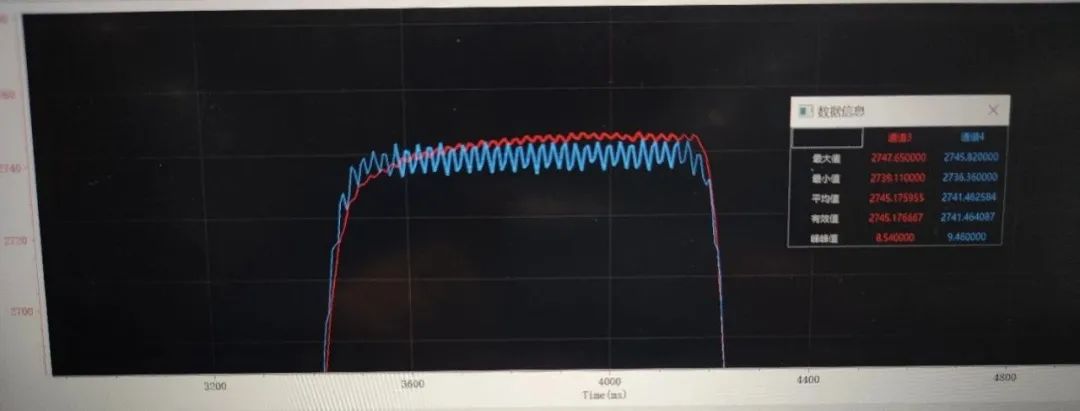
笔者在上面的测试中,速度反馈波动频率与实际转速正好满足以上的数学关系式,则可以判定4轴的震动是由谐波减速机引起的。
最难的是要把这个分析过程解释给日本工程师听,好在和他交流的过程中间有他们带的翻译,真是为难翻译小哥儿了O(∩_∩)O不过听完我的分析后他居然还不死心,又打越洋电话回去问他们公司的研发(日本工程师真是固执啊),还是他们研发肯定了我的说法。。。
本文链接:https://kk3k.com/jiqiren/19.html
人形机器人传感器人形机器人课程人形机器人应用领域人形机器人排行榜中控智慧人形机器人人形机器人舵机电机人形机器人娃娃北京人形双手协作机器人人形机器人高达人形机器人**







网友评论